Codex 推出 /goal 功能,不達目標,不罷休
整理版優先睇
Codex 推出 /goal 功能,設定目標後 AI 會自動循環執行到完成,代表從「過程導向」轉向「目標導向」嘅人機協作新模式
呢篇文章係整理自 OpenAI 嘅 Codex CLI 新功能 /goal,同埋社區對 Ralph Loop 模式嘅討論。文章作者想帶出嘅核心問題係:點樣將 AI 嘅工作模式從「逐個步驟指示」變成「目標委託」,令 AI 自己不斷嘗試直到完成。
整體結論係:/goal 功能雖然只係實驗性,但佢代表咗一個重要趨勢——人類以後要專注嘅唔係點樣執行步驟,而係清楚定義自己想要嘅目標同點樣驗證結果。文章仲詳細介紹咗用法、防護機制同源碼分析,指出呢個功能嘅設計係為咗防止 AI 空轉或過早判斷完成。作者認為,呢個改變就好似從手繪地圖變成導航 App,人類只需要輸入目的地,路線由 AI 自己規劃。
- 結論:/goal 將 AI 協作從「你講一步我做一步」變為「你定目標我全程負責」,代表 Software 3.0 嘅趨勢。
- 方法:喺 Codex CLI 輸入 /goal 後加目標描述,AI 會自動循環執行,並有 /goal pause、/goal resume、/goal clear 等輔助命令。
- 差異:Codex 嘅 /goal 係「馬拉松」模式,同一會話持續追蹤目標,唔似社區 Ralph Loop 嘅「接力賽」模式每次重新開上下文。
- 啟發:人類嘅工作重心應該從過程監控轉向目標定義同結果驗證,呢個先係更考驗判斷力嘅部分。
- 可行動點:可以試用 Codex CLI 0.128.0 以上版本,喺 config.toml 啓用 goals 功能,並將詳細指令寫入 .md 文件用 /goal follow 執行。
Codex CLI 開源倉庫
OpenAI Codex CLI 官方開源倉庫,包含 /goal 功能源碼
Felipe Coury 原帖
介紹 /goal 功能嘅帖文
Ralph Loop 社區實現
一款開源嘅 Ralph Loop 模式實現,採用接力賽方式
Ralph Loop 同 /goal 嘅關係
Codex 嘅 /goal 功能背後有個概念叫 Ralph Loop,源自《辛普森一家》嘅 Ralph Wiggum,代表一種「設定目標後不斷嘗試直到成功」嘅 Agent 循環模式。社區原始實現用接力賽方式:每輪完結後重新開新上下文,靠 git 記錄保持記憶。
Ralph Loop
接力賽
而 Codex 嘅 /goal 就唔同,佢係同一會話入面持續循環,好似馬拉松選手,唔需要每次都重新嚟過。呢個分別令目標追蹤更連貫,減少上下文丟失。
馬拉松
點樣用 /goal 同輔助命令
先確保 Codex CLI 版本 >= 0.128.0,然後喺 ~/.codex/config.toml 加入配置啓用功能。之後喺 CLI 輸入 /goal 後面跟目標描述,AI 就會自動開工。
[features]
goals = true/goal 重構所有的數據庫查詢,添加連接池- /goal pause:暫停當前目標
- /goal resume:恢復暫停嘅目標
- /goal clear:清除目標
/goal follow instructions.md
如果目標描述太長,可以寫入 .md 文件,然後用 /goal follow 執行,咁就唔會被上下文壓縮而丟失細節。仲有個 /side 命令,可以喺唔打斷主線目標嘅情況下開分支會話問問題,問完按 Esc 返主線。
/side
上下文壓縮
防護機制:點樣防止空轉同提早收工
一個會自動循環嘅 Agent 最怕就係空轉或者過早判斷完成。Codex 設計咗幾層防護。
零工具調用抑制
如果一輪續跑中 Agent 冇調用任何工具(冇寫 code、冇 run command),系統會判定佢卡住咗,自動停止循環。
預算控制
每個目標可以設 token 預算同時間上限,超出時系統會提示模型總結進度,俾用戶下一步指示。
完成審計
- 1 將目標拆解成具體嘅可交付物
- 2 建立檢查清單,將每個需求映射到實際證據
- 3 檢查真實嘅文件、輸出、測試結果
- 4 唔可以只係因為「測試通過咗」就認為目標完成
呢個審計機制專門防止「代理證據接受」——即係模型將「我產出咗嘢」當成「我達成咗目標」。測試通過唔等於功能完成,呢啲係 Agent 循環最隱蔽嘅失敗模式。
代理證據接受
過早關閉
目標導向嘅意義
/goal 改變嘅唔係 AI 嘅能力邊界,而係人同 AI 嘅協作界面。從「你講一句我做一步」變成「你定目標我全程負責」,從對話變成委託。
過程導向
目標導向
呢個轉變好似從手繪地圖變成導航 App:以前你要自己規劃路線、記住每個路口;而家你只需要輸入目的地。Karpathy 喺 AI Ascent 演講入面將呢個趨勢總結為 Software 3.0 —— 從 how(點做)到 show(示範)再到 what(要乜)。
Software 3.0
作者→教練→指揮官
OpenAI 幫 Codex CLI 加咗個新指令,叫 /goal。
你畀佢設定一個目標,佢就不停咁行,跨多輪唔會丟失上下文,唔達到目的唔罷休。
呢個功能隨住 Codex CLI 0.128.0 版本推出,暫時仲係實驗性功能,要手動開啓。Codex 團隊嘅 Felipe Coury 係咁樣介紹佢嘅:
“ 令目標喺多個回合入面保持活躍。唔達成,就唔停。
而喺我睇嚟,呢個功能背後其實隱藏住一個趨勢:喺 AI 時代,過程開始變得冇咁重要,重要嘅,係目標。
01Ralph Loop
要理解 /goal,要先講下 Ralph Loop。
呢個名嚟自《阿森一族》入面嘅 Ralph Wiggum,嗰個「無知、執着、樂觀」嘅男仔。開發者 Geoffrey Huntley 用佢個名命名咗一種 Agent 循環模式:畀 Agent 設定一個目標,等佢自己不停疊代,失敗咗就重新嚟過,直到達成目標。
VentureBeat 甚至寫咗篇文章叫《Ralph Wiggum 點樣由阿森一族變成 AI 界最紅嘅名》。
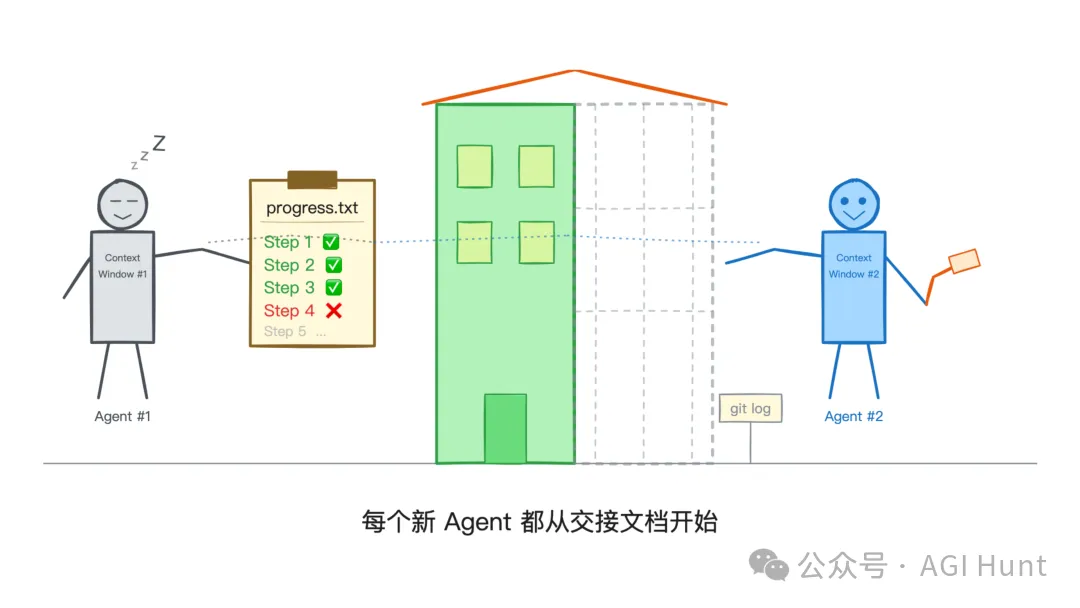
喺開發社羣嘅原始實現入面,Ralph Loop 嘅做法比較「粗暴」:每一輪完結之後,Agent 從頭開始一個新嘅上下文窗口,靠 git 記錄同進度檔案嚟保持記憶。
相當於每次換班,都交一份書面交接。
而 Codex 嘅 /goal ,就採用咗唔同嘅路線。
佢係一個進程入面嘅持續循環,目標喺同一個會話入面跨輪次保持活躍,唔需要重新開一個新上下文。
換句話講,開發社羣嘅 Ralph Loop 好似接力賽,每一棒換個新人。
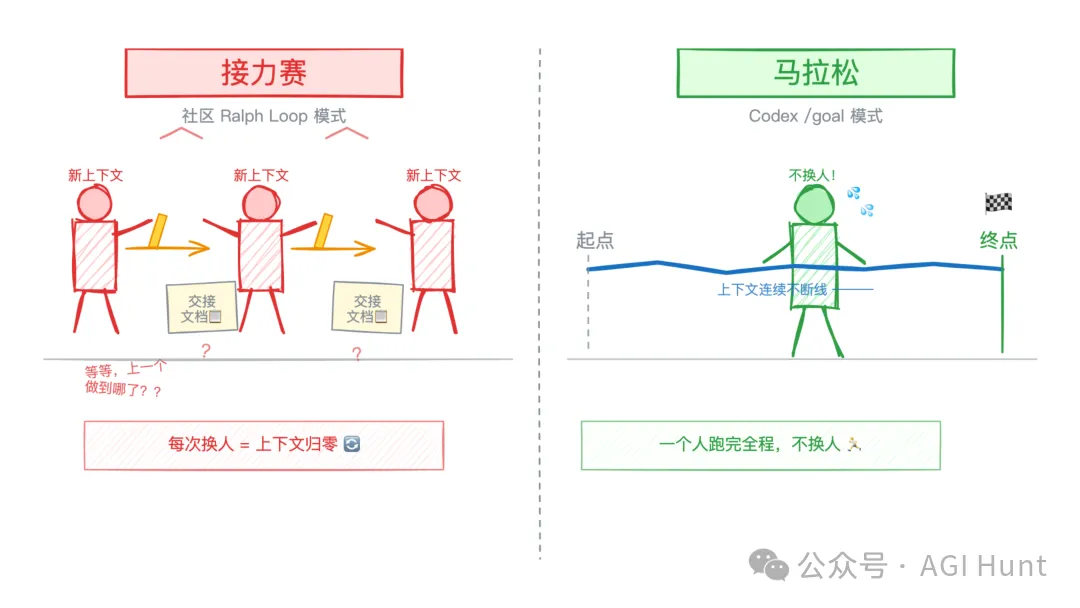
而 Codex 嘅 /goal,更加似一個馬拉松選手,由頭跑到尾,攰嘅時候可以抖下,但係唔會換人。
點樣用
用法好簡單。
首先要確保 Codex CLI 版本係 0.128.0 或以上,然後喺設定檔 ~/.codex/config.toml 入面加一段:
●●●
[features]
goals =true└
開咗之後,喺 Codex CLI 度輸入:
●●●
/goal 重構所有的數據庫查詢,添加連接池└
Codex 就會開始圍繞呢個目標持續工作,寫代碼、行測試、檢查結果,做完一輪如果目標未達成,佢會自動開下一輪。
另外,仲有幾個輔助指令:
• /goal pause:暫停當前目標
• /goal resume:恢復暫停咗嘅目標
• /goal clear:清除目標
如果你㩒 Ctrl+C 中斷,目標會自動暫停,下次恢復線程嘅時候會自動繼續。
一個實用嘅小技巧係:如果你嘅目標描述太長,直接寫喺指令度可能會出錯。可以將詳細嘅指示寫喺一個 .md 檔案裏面,然後用 /goal follow instructions.md 嚟執行。
呢個技巧我好耐之前就不停推薦過,放喺檔案仲有一個好處,就係唔會因為上下文壓縮而丟失細節。
呢個版本仲附帶咗一個 /side 指令,可以喺唔打斷主線目標嘅情況下,臨時開一個分支會話問問題。問完㩒 Esc 就返返主線,分支會話直接掉咗。呢兩個指令配合埋一齊,其實幾就手。
不過……呢個應該係為咗避嫌抄襲 Claude Code,否則直接叫 /btw 咪得囉 ,見:Claude Code 新增 /btw 功能:等你喺 AI 做嘢嗰陣「插嘴」提問
,見:Claude Code 新增 /btw 功能:等你喺 AI 做嘢嗰陣「插嘴」提問
唔會停,但係都唔蠢
一個會自動循環嘅 Agent,最令人擔心嘅就係:佢會唔會喺冇意義嘅嘢上空轉呢?
Codex 嘅實現入面做咗一套防護機制。
零工具調用抑制。如果一輪續跑入面,Agent 冇調用任何工具(冇寫代碼、冇行指令、冇讀檔案),系統會判定佢「卡住咗」,自動停止循環,直到有新嘅輸入先會重新觸發。
預算控制。每個目標可以設定 token 預算同時間上限。當消耗超出預算嗰陣,系統會注入一條提示,話畀模型知:唔好再開新任務,總結下進展,畀用戶一個明確嘅下一步。
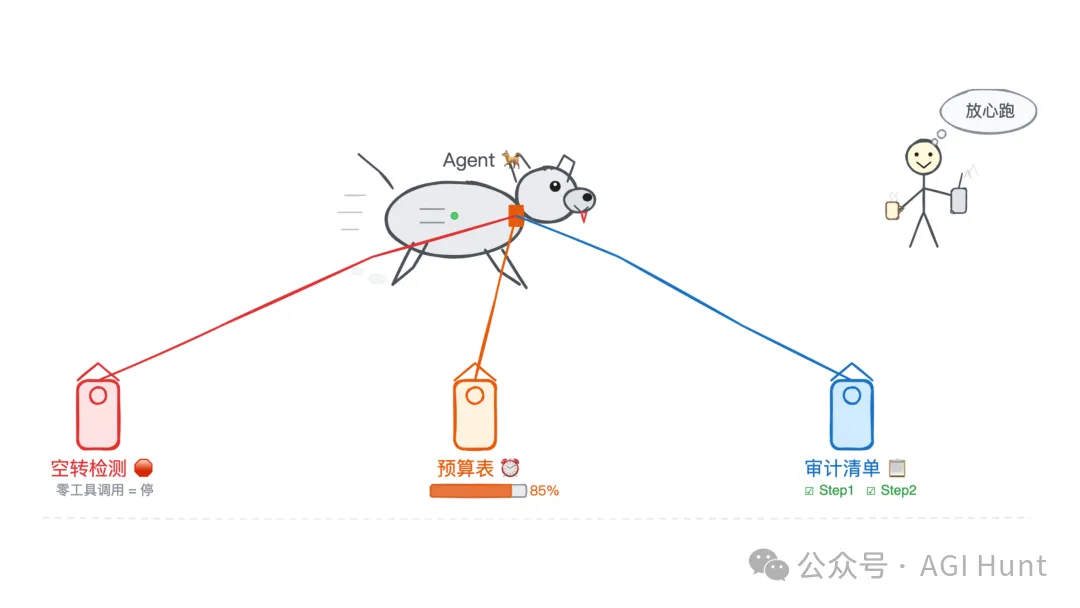
完成審計協議。每次續跑開始嗰陣,系統會注入一條隱藏嘅 developer 指令,要求佢執行一套「完成審計」:
1. 將目標拆解成具體嘅可交付成果
2. 整一份檢查清單,將每個需求對應到實際證據
3. 檢查真實嘅檔案、輸出、測試結果
4. 唔可以淨係話「測試通過咗」就當目標完成
亦即係話,系統喺機制層面防止咗模型嘅一個常見問題:將「我產出咗嘢」錯當成「我達成咗目標」。
測試通過咗唔等於功能完成咗,代碼寫完咗唔等於需求滿足咗。呢種「代理證據接受」(proxy-evidence acceptance)係 Agent 循環入面最隱蔽嘅失敗模式之一。
04原始碼分析
Codex 係開源嘅,所以可以直接睇佢係點樣實現。我更新咗代碼之後叫 AI 幫我睇咗一次。
功能嘅核心邏輯喺 codex-rs/core/src/goals.rs 入面,大概 1570 行 Rust 代碼。
成個系統有三層:
持久化層: 目標狀態存喺 SQLite 數據庫入面,進程重開、線程恢復都唔會丟失。目標有四種狀態:Active(進行中)、Paused(暫停)、BudgetLimited(預算用盡)、Complete(完成)。
工具層: 系統向模型暴露咗三個工具:get_goal(讀取當前目標)、create_goal(創建目標)、update_goal(更新目標狀態)。
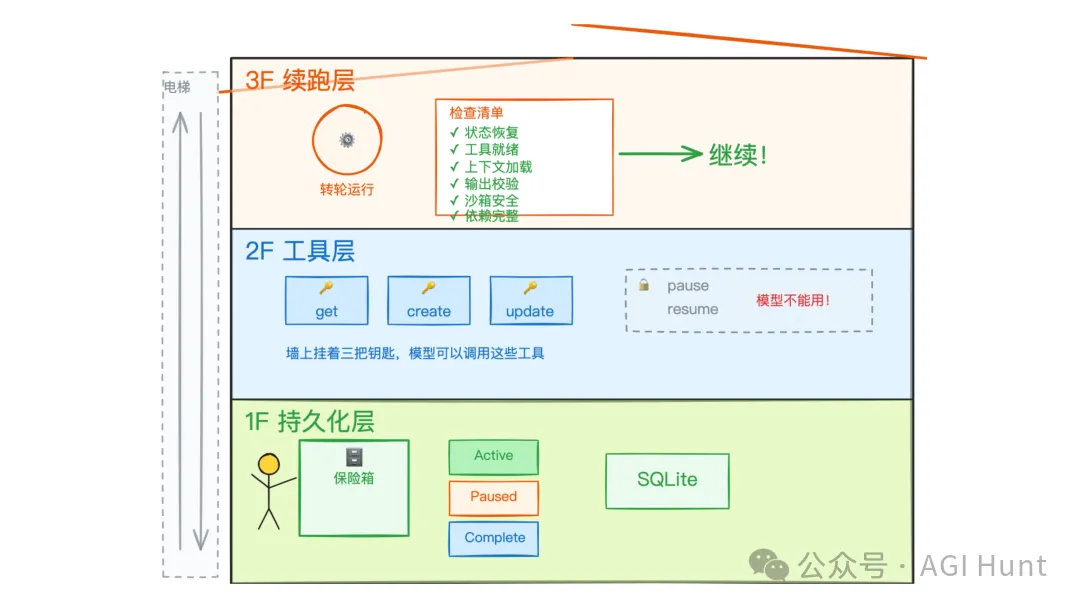
呢度有個關鍵嘅設計決策:模型只能夠將目標標記為「完成」,唔可以暫停或者恢復。 暫停同恢復,只有用戶先可以做到。
原始碼入面嘅邏輯係:
●●●
if args.status != ThreadGoalStatus::Complete {
return Err(FunctionCallError::RespondToModel(
"update_goal can only mark the existing goal complete"
));
}└
點解要咁樣設計呢?
呢個係為咗防止模型自己「偷懶」,覺得差唔多就畀自己暫停一下(係咪好有經驗?)。
所以,你設定咗目標之後,模型一係完成佢,一係你嚟叫停。
冇第三條路。
續跑層: 呢個係最核心嘅部分。每一輪完結之後,系統會執行一個檢查鏈:
1. 目標功能係咪開咗
2. 當前係咪有活躍嘅目標
3. 係咪有其他輪次喺度跑
4. 係咪有待處理嘅訊息隊列
5. 續跑係咪俾人抑制咗(前一輪零工具調用)
6. 當前係咪喺 Plan 模式(Plan 模式下目標會被忽略)
全部通過之後,系統會注入一條 developer 訊息,入麪包含目標描述、預算使用情況,同埋嗰套完成審計協議。然後新一輪開始。
仲有一個小細節:token 計算只統計非緩存嘅輸入 token 加上輸出 token。 緩存命中嘅部分唔計入預算。亦即係話,預算追蹤嘅係「新增嘅工作量」,重複讀取已有上下文唔收費。
呢個功能嘅開發者係 Eric Traut,亦即係 Pyright(Python 類型檢查器)嘅作者。Felipe Coury 話佢係「每日可以一齊做嘢嘅 GOAT 之一」。
05實驗性功能
當然啦,/goal 始終係實驗性功能,暫時亦有啲限制。
目前佢淨係喺 CLI 度用到,Codex 嘅桌面應用暫時未有呢個功能。
另外,如果 API 配額用曬,/goal 會陷入一個尷尬嘅循環 BUG:不停咁發請求,不停收到配額用盡嘅錯誤,然後繼續重試……有人叫佢做「ralph loop of errors」。
喺 Plan 模式下,目標系統會自動被忽略。亦即係話,你唔可以一邊規劃一邊設定目標,兩種模式係互斥嘅。
呢個都容易理解,目標係制定好目標,有啲奇怪……
不過從實際測試睇,當前嘅目標完成判斷依然存在「過早關閉」嘅問題。模型有時會因為產出咗某個 artifact 就以為目標完成咗,即使實際上只係做咗表面功夫。
最重要嘅,係目標
/goal 嘅代碼量唔大,概念都唔複雜。但係佢代表嘅方向,我覺得可能比大多數「重大更新」更加有意義。
因為佢改變嘅唔係 AI 嘅能力邊界,而係人同 AI 嘅協作界面。
由「你講一句我做一步」,變成「你定目標我全程負責」。
由「對話」,變成「委託」。
呢個背後嘅以終為始嘅思維方式嘅轉變,比功能本身更加值得思考。
我自己而家嘅編程入面,基本上都好少親手寫代碼嘅過程。我更加多嘅時間同精力放咗喺:我到底要達成咩目標?我點樣驗證呢個目標真係完成咗?
點樣制定正確嘅目標,點樣諗清楚到底要做啲咩,呢個其實先係更加考驗人、而且更加重要嘅判斷同工作。
以前我哋習慣咗「過程導向」嘅工作模式:先規劃步驟,再逐步執行,每一步都要人睇住。
但係 AI Agent 正正將呢套邏輯翻轉咗:你只需要定義終點,條路係 Agent 自己行出來嘅。
呢個同傳統編程嘅分別,就好似導航 App 同手繪地圖嘅分別。手繪地圖時代,你要自己規劃路線、記住每個路口。有咗導航之後,你只需要輸入目的地,至於行邊條路、點樣避塞車、邊度右轉,呢啲係導航嘅事。
而 Karpathy 喺最近 AI Ascent 嘅演講入面,都表達咗類似嘅判斷。佢將呢個趨勢總結為 Software 3.0(詳見前文:軟件 3.0 時代嚟臨):
“ 傳統軟件自動化嘅係你可以規格化嘅嘢,而 AI 自動化嘅係你可以驗證嘅嘢。
三代軟件範式嘅演進主線,其實就係人類參與方式嘅變化。
由 how(話畀機器點樣做),到 show(示範畀機器睇點樣做),再到 what(話畀機器你要啲咩)。
/goal 功能,都算係呢條主線上面最新嘅一個註腳。
你定義目標,亦即係嗰個可驗證嘅終態。Agent 自己揾路徑。你驗證結果,佢負責過程。
當 Agent 開始管理自己嘅進度,而且可以真正達成設定嘅目標,人類唯一需要做好嘅事,就剩返一件:
諗清楚,自己到底想要啲咩。
◇ ◆ ◇
• Codex CLI 開源倉庫:https://github.com/openai/codex
• Felipe Coury 嘅原帖:https://x.com/fcoury/status/2049917871799636201
• Ralph Loop 開發社羣實現:https://github.com/Th0rgal/open-ralph-wiggum
OpenAI 給 Codex CLI 加了個新命令,叫 /goal。
你給它設一個目標,它就一直跑,跨多輪不丟上下文,不達目的不罷休。
這個功能隨 Codex CLI 0.128.0 版本發佈,目前還是實驗性功能,需要手動開啓。Codex 團隊的 Felipe Coury 是這樣介紹它的:
“ 讓目標在多個回合中保持活躍。不達成,就不停。
而在我看來,這個功能背後其實藏着一個趨勢:在 AI 時代,過程正在變得不那麼重要了,重要的,是目標。
01Ralph Loop
要理解 /goal,得先聊聊 Ralph Loop。
這個名字來自《辛普森一家》裏的 Ralph Wiggum,那個「無知、執着、樂觀」的小男孩。開發者 Geoffrey Huntley 用他的名字命名了一種 Agent 循環模式:給 Agent 設定一個目標,讓它自己不斷迭代,失敗了就重來,直到目標達成。
VentureBeat 甚至寫了篇文章叫《Ralph Wiggum 如何從辛普森一家變成 AI 界最火的名字》。
在社區的原始實現裏,Ralph Loop 的做法比較「暴力」:每一輪結束後,Agent 從頭開始一個新的上下文窗口,靠 git 記錄和進度文件來保持記憶。
相當於每次換班,都交一份書面交接。
而 Codex 的 /goal ,則採取了不同的路線。
它是一個進程內的持續循環,目標在同一個會話裏跨輪次保持活躍,不需要從頭啓動新上下文。
換句話說,社區的 Ralph Loop 像是接力賽,每一棒換個新人。
而 Codex 的 /goal,更像是一個馬拉松選手,從頭跑到尾,累了可以暫停,但不換人。
如何使用
用法很簡單。
先確保 Codex CLI 版本在 0.128.0 以上,然後在配置文件 ~/.codex/config.toml 里加一段:
●●●
[features]
goals =true└
開啓後,在 Codex CLI 裏輸入:
●●●
/goal 重構所有的數據庫查詢,添加連接池└
Codex 就會開始圍繞這個目標持續工作,寫代碼、跑測試、檢查結果,一輪做完如果目標沒達成,它會自動開啓下一輪。
此外,還有幾個輔助命令:
• /goal pause:暫停當前目標
• /goal resume:恢復暫停的目標
• /goal clear:清除目標
如果你按 Ctrl+C 中斷,目標會自動暫停,下次恢復線程時會自動繼續。
一個實用的小技巧是:如果你的目標描述太長,直接寫在命令裏可能會出錯。可以把詳細的指令寫在一個 .md 文件裏,然後用 /goal follow instructions.md 來執行。
這個技巧我好早前就反覆推薦過,放在文件裏還有個好處是,不會被上下文壓縮而丟失細節。
該版本還附帶了一個 /side 命令,可以在不打斷主線目標的情況下,臨時開一個分支會話問問題。問完按 Esc 就回到主線,分支會話直接丟棄。這兩個命令配合起來,其實挺順手的。
不過……這應該為了避嫌抄襲 Claude Code,不然直接叫 /btw 不就得了,見:Claude Code 新增 /btw 功能:讓你在 AI 幹活時「插嘴」提問
不會停,但也不傻
一個會自動循環的 Agent,最讓人擔心的就是:它會不會在無意義的事情上空轉呢?
Codex 的實現裏做了一套防護機制。
零工具調用抑制。如果一輪續跑中,Agent 沒有調用任何工具(沒寫代碼、沒跑命令、沒讀文件),系統會判定它「卡住了」,自動停止循環,直到有新的輸入才會重新觸發。
預算控制。每個目標可以設置 token 預算和時間上限。當消耗超出預算時,系統會注入一條提示,告訴模型:別再開新任務了,總結一下進展,給用戶一個明確的下一步。
完成審計協議。每次續跑開始時,系統會給模型注入一條隱藏的 developer 指令,要求它執行一套「完成審計」:
1. 把目標拆解成具體的可交付物
2. 建一份檢查清單,把每個需求映射到實際證據
3. 檢查真實的文件、輸出、測試結果
4. 不能僅憑「測試通過了」就認為目標完成
也就是說,系統在機制層面防止了模型的一種常見問題:把「我產出了東西」錯當成「我達成了目標」。
測試通過了不等於功能完成了,代碼寫完了不等於需求滿足了。這種「代理證據接受」(proxy-evidence acceptance)是 Agent 循環中最隱蔽的失敗模式之一。
04源碼分析
Codex 是開源的,所以可以直接來看它是怎麼實現的。我更新了代碼後讓 AI 給我翻了一把。
功能的核心邏輯在 codex-rs/core/src/goals.rs 裏,大約 1570 行 Rust 代碼。
整個系統有三層:
持久化層: 目標狀態存在 SQLite 數據庫裏,進程重啓、線程恢復都不會丟失。目標有四種狀態:Active(進行中)、Paused(暫停)、BudgetLimited(預算耗盡)、Complete(完成)。
工具層: 系統給模型暴露了三個工具:get_goal(讀取當前目標)、create_goal(創建目標)、update_goal(更新目標狀態)。
這裏有個關鍵的設計決策:模型只能把目標標記為「完成」,不能暫停或恢復。 暫停和恢復,只有用戶能做。
源碼裏的邏輯是:
●●●
if args.status != ThreadGoalStatus::Complete {
return Err(FunctionCallError::RespondToModel(
"update_goal can only mark the existing goal complete"
));
}└
為什麼這麼設計呢?
這是為了防止模型自己「偷懶」,覺得差不多了就給自己暫停一下(是不是很有經驗?)。
從而,在你設了目標之後,模型要麼完成它,要麼你來喊停。
沒有第三條路。
續跑層: 這是最核心的部分。每一輪結束後,系統會執行一個檢查鏈:
1. 目標功能是否開啓
2. 當前是否有活躍的目標
3. 是否有其他輪次在跑
4. 是否有待處理的消息隊列
5. 續跑是否被抑制(前一輪零工具調用)
6. 當前是否在 Plan 模式(Plan 模式下目標被忽略)
全部通過後,系統注入一條 developer 消息,包含目標描述、預算使用情況,和那套完成審計協議。然後新一輪開始。
還有個小細節:token 計算只統計非緩存的輸入 token 加上輸出 token。 緩存命中的部分不算入預算。也就是說,預算追蹤的是「新增的工作量」,復讀已有上下文不收費。
這個功能的開發者是 Eric Traut,也就是 Pyright(Python 類型檢查器)的作者。Felipe Coury 稱他是「每天能一起工作的 GOAT 之一」。
05實驗性功能
當然了,/goal 畢竟還是實驗性功能,目前也有一些侷限。
目前它只在 CLI 裏可用,Codex 的桌面應用暫時還沒有這個功能。
另外,如果 API 配額用完了,/goal 會陷入一個尷尬的循環 BUG:不斷髮請求,不斷收到配額耗盡的錯誤,然後繼續重試……有人稱之為「ralph loop of errors」。
在 Plan 模式下,目標系統會被自動忽略。也就是說,你不能一邊規劃一邊設目標,兩種模式是互斥的。
這倒是好理解,目標是制定好目標,有點奇怪……
不過從實測看,當前的目標完成判斷依然存在「過早關閉」的問題。模型有時候會因為產出了某個 artifact 就認為目標完成了,即使實際上只完成了表面工作。
最重要的,是目標
/goal 的代碼量不大,概念也不復雜。但它代表的方向,我想可能比大多數「重大更新」都更有意義。
因為它改變的並非 AI 的能力邊界,而是人和 AI 的協作界面。
從「你說一句我做一步」,變成「你定目標我全程負責」。
從「對話」,變成了「委託」。
這背後的以終為始的思維方式的轉變,比功能本身更值得思考。
我自己現在的編程中,也基本不太涉及動手編寫代碼的過程了。我更多的時間和精力花在了:我到底要達成什麼目標?我怎麼驗證這個目標真的完成了?
如何制定正確的目標,如何想清楚到底要做什麼,這其實才是更為考驗人的、也更為重要的判斷和工作。
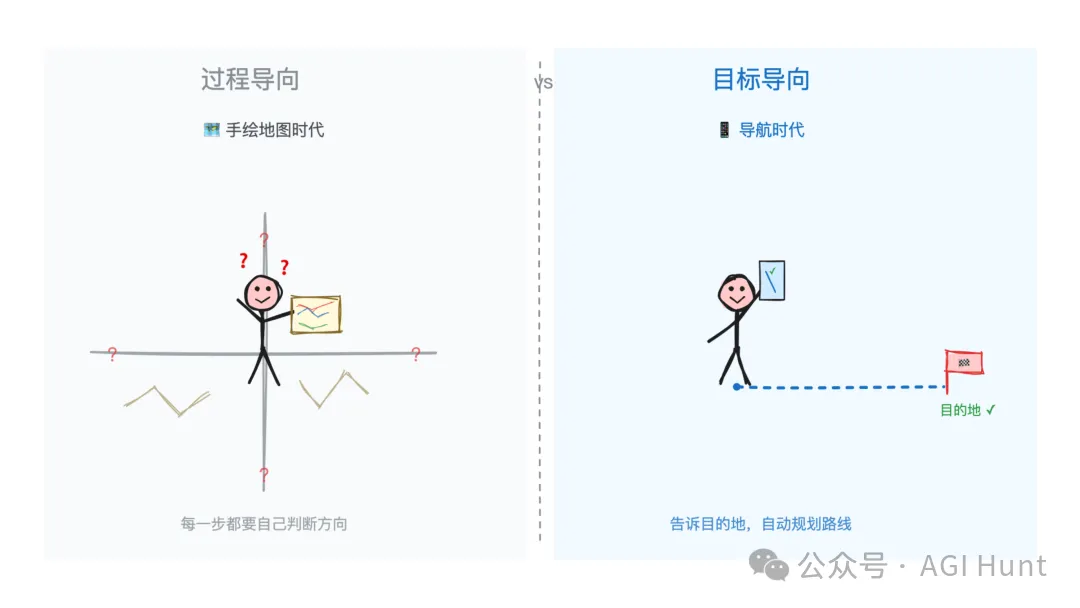
過去我們習慣了「過程導向」的工作方式:先規劃步驟,再逐步執行,每一步都要人盯着。
但 AI Agent 正在把這套邏輯翻轉了過來:你只需要定義終點,路徑是 Agent 自己走出來的。
這和傳統編程的區別,就像導航 App 和手繪地圖的區別。手繪地圖時代,你得自己規劃路線、記住每個路口。有了導航之後,你只需要輸入目的地,至於走哪條路、怎麼避堵、哪裏右轉,那是導航的事了。
而 Karpathy 在最近 AI Ascent 的演講裏,也表達了類似的判斷。他把這個趨勢總結為 Software 3.0(見前文:軟件 3.0 時代來臨):
“ 傳統軟件自動化的是你能規格化的東西,而 AI 自動化的是你能驗證的東西。
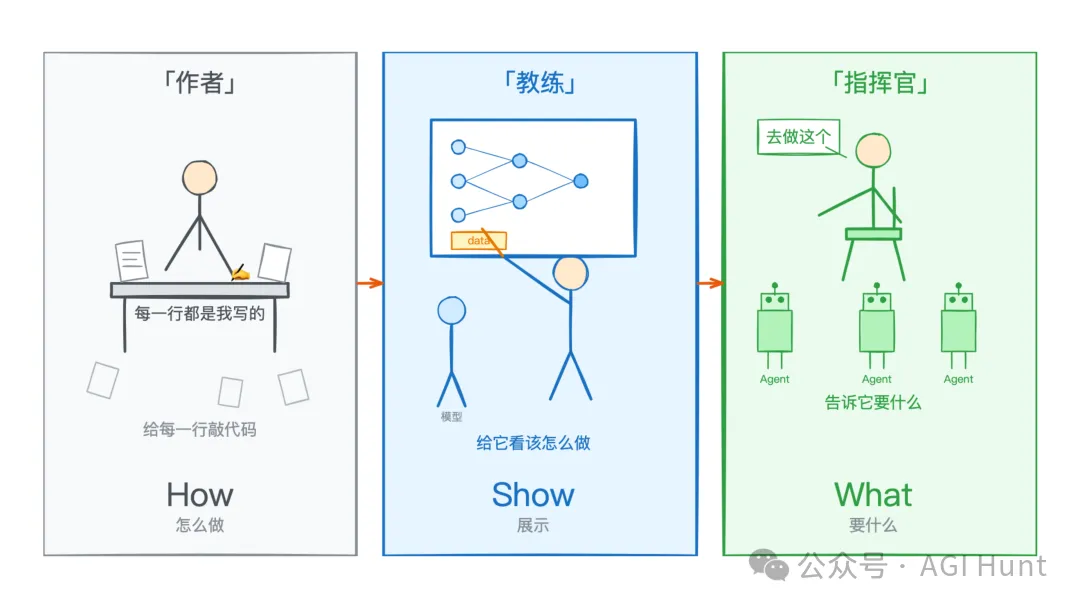
三代軟件範式的演進主線,其實就是人類參與方式的變化。
從 how(告訴機器怎麼做),到 show(給機器看該怎麼做),再到 what(告訴機器你要什麼)。
/goal 功能,也算是這條主線上最新的一個註腳。
你定義目標,也就是那個可驗證的終態。Agent 自己去找路徑。你驗證結果,它負責過程。
當 Agent 開始管理自己的進度,並能真正達成設定的目標,人類唯一需要做好的事情,就只剩下一件了:
想清楚,自己到底要什麼。
◇ ◆ ◇
• Codex CLI 開源倉庫:https://github.com/openai/codex
• Felipe Coury 的原帖:https://x.com/fcoury/status/2049917871799636201
• Ralph Loop 社區實現:https://github.com/Th0rgal/open-ralph-wiggum