Codex 新命令 /goal 深度解析
整理版優先睇
Codex 新增 /goal 命令實現長任務追蹤,從源碼剖析其持久化、預算控制與自主續航機制。
呢篇文章係關於 OpenAI Codex rust-v0.128.0 版本入面新增嘅 /goal 指令。作者透過深入源碼,分析咗呢個功能點樣由 TUI 指令解析、App Server RPC,一路落到 Core Runtime 同 SQLite 持久化層。作者想帶出嘅係,/goal 唔係一個簡單嘅指令,而係一個完整嘅長任務追蹤系統,令 AI 智能體可以持續關注終極目標,唔會喺多輪對話中失憶。
文章指出,/goal 嘅核心思想嚟自 Ralph Loop——一個「目標 -> 執行 -> 觀察 -> 修正 -> 再執行」嘅控制環。佢透過 SQLite 將目標持久化,令到即使重啓 Codex,目標仍然存在。同時,佢引入 Token 預算限制,避免智能體無限循環。最關鍵嘅係自主續航環路,當任務空閒時自動觸發下一輪對話,但喺模型冇進行工具調用時會抑制自動觸發,防止死鎖。整體上,/goal 令到 Codex 從被動執行者變成預算敏感嘅任務管理者。
- /goal 命令提供持久化目標管理,支援自動續航同 Token 預算限制,令 Codex 處理長任務更可靠。
- 實現上透過 SQLite 儲存目標狀態,Runtime 做用量核算,超支時注入隱藏提示引導模型收尾。
- 相比外部腳本循環,/goal 將目標、狀態、預算同完成工具整合喺同一個執行緒運行時,更輕量穩定。
- Ralph Loop 思想——目標外部化、每輪可丟棄、驗證反壓、退出信號明確——係設計長期任務 AI 嘅關鍵工程約束。
- 開發者可以用 create_goal、get_goal、update_goal 工具,令智能體自我管理任務進度同預算。
從 Ralph Loop 到 /goal:理解控制環
想清楚理解 /goal,最好先認識 Ralph Loop。呢個模式聽落好粗暴:一個 while true 循環反覆啓動 AI 編碼 Agent,將同一份任務說明餵畀模型,等佢讀代碼、做修改、運行驗證、輸出完成或卡住嘅信號,然後進入下一輪。
但真正重要嘅係四個工程約束:目標規格外部化、每輪執行可丟棄、驗證形成反壓同退出信號明確。呢啲約束確保目標唔靠模型短期記憶,而係落喺文件同測試入面。
/goal 命令:持久化與自動續航
/goal 命令畀用戶為當前會話設定一個持久化目標。呢個目標會存喺 SQLite 嘅 thread_goals 表,就算重啓 Codex 都唔會消失。狀態欄位包括 objective、status 同 token_budget。
當目標處於 Active 狀態,而會話空閒嗰陣,Codex 會自動觸發下一輪對話嚟繼續任務。呢個自動續航機制令智能體可以持續工作,唔使用戶手動輸入。同時支援Token 預算限制,防止無限循環。
核心機制:用量核算與預算限制
/goal 嘅強大之處在於佢可以精確感知任務消耗。account_thread_goal_usage 呢個函數負責更新進度,佢會自動扣除Cached Input Tokens,只計真實推理成本。呢個係「物理計費 vs 邏輯計費」嘅分別。
當消耗超過 token_budget,狀態會切換做 BudgetLimited,同時 Runtime 向模型注入一條隱藏的 developer 消息,引導模型「儘快收尾」,實現優雅嘅預算轉向。
自主續航環路:防止死鎖的設計
呢個係實現「自主智能體」最關鍵嘅一環。當 Goal 係 Active 而 Thread 空閒,GoalRuntimeState 就會被激活。但系統會檢查上一輪有冇進行過工具調用——如果冇,就會抑制下一次自動觸發,防止死鎖。
所謂「空閒」唔單止係 UI 冇鬱動,源碼仲會排除已有活躍 Turn、下一輪隊列已有輸入、內部 mailbox 有待處理消息等情況。呢個設計確保智能體喺瓶頸時停低,等用戶幹預。
模型工具:智能體的自我管理
Codex 向模型暴露咗三個核心工具,令佢變成預算敏感的任務管理者:
- 1 create_goal:主動建立持久化目標,等系統記住要做乜。
- 2 get_goal:查看剩餘預算同用量,等模型知自己仲有幾多資源。
- 3 update_goal:任務完成後標記 complete,正式結束目標。
呢啲工具畀模型從「被動執行者」升級做主動管理者,可以自己決定點樣分配 Token 同處理任務邊界。
喺 OpenAI Codex rust-v0.128.0 版本入面,/goal 命令嘅引入令 Codex 開始有更明確嘅長任務追蹤能力。呢篇文章會深入 Codex 源碼,揭秘呢個功能點樣由 TUI 命令解析、App Server RPC,一路深入到 Core Runtime 同 SQLite 持久化層。
一、先理解 Ralph Loop:將智能體變成一個可驗證閉環
理解 /goal 之前,最好先理解 Ralph Loop。佢聽落好粗暴:一個 while true 循環反覆啟動 AI 編碼 Agent,將同一份任務說明或規格文檔餵俾模型,等佢讀 code、做修改、運行驗證、輸出完成或卡住嘅信號,然後進入下一輪。
呢個模式真正重要嘅唔係「無限循環」,而係四個工程約束:
目標規格外部化:目標唔靠模型短期記憶保存,而係落喺 PRD、任務清單、測試、倉庫文件入面。
每輪執行可丟棄:上下文窗口可以刷新,Agent 每輪重新讀取現實狀態,減少長上下文漂移。
驗證形成反壓:測試、類型檢查、Lint、日誌同評審結果會話俾 Agent 知「未過到」,迫佢繼續改。
退出信號明確:完成、卡住、超預算都必須有可觀察嘅狀態,唔係靠模型一句「差唔多」。
所以 Ralph Loop 嘅本質係一種「目標 -> 執行 -> 觀察 -> 修正 -> 再執行」嘅控制環。Codex 嘅 /goal 可以當做呢個思想喺產品入面嘅內建版本:佢唔再依賴外部 bash 腳本反覆啟動進程,而係將目標、狀態、預算、續航提示詞同完成工具都接入同一個 Thread runtime。
二、咩係 /goal?
對於長航時任務(Long-running tasks),開發者往往需要 AI 保持對終極目標嘅關注,而唔係喺多輪對話入面逐漸「失憶」。/goal /goal 命令允許用戶為當前會話設置一個持久化嘅目標。
狀態化:目標儲存喺 SQLite 入面,重啟 Codex 依然存在。
自動化:當目標處於 Active 狀態而且會話空閒時,Codex 會自動觸發下一輪對話去繼續任務。
可控性:支援 Token 預算限制,防止智能體陷入無限循環或過度消耗。
三、技術全景圖:由指令到狀態
/goal /goal 嘅實現唔係單一模塊堆砌,而係一個貫穿全棧嘅精妙設計。
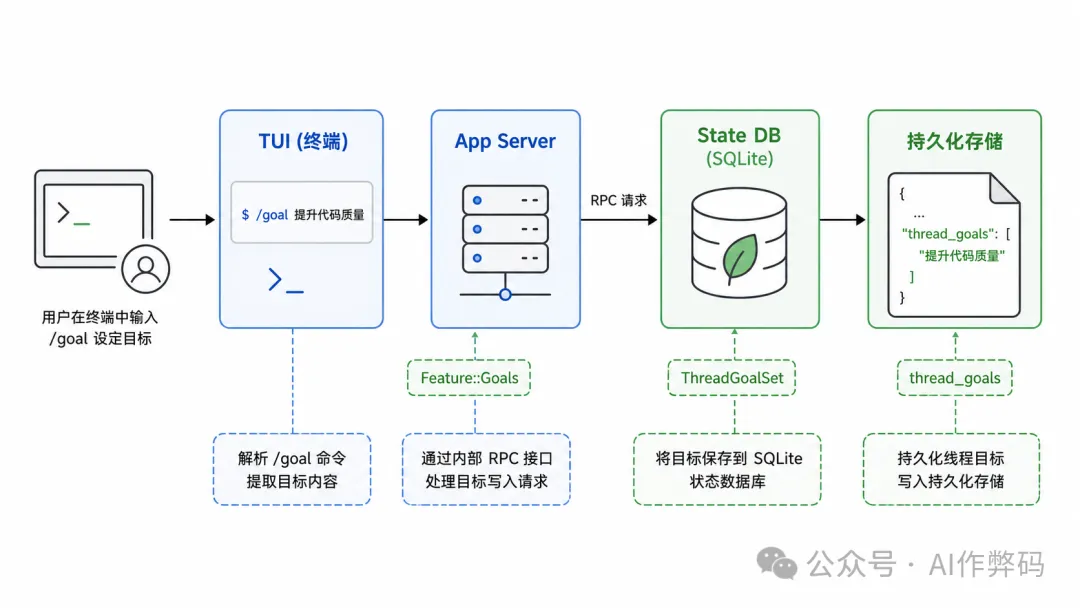
1. 交互層 (TUI & Slash Command)
在 codex-rs/tui/src/slash_command.rs 中,SlashCommand::Goal /goal 被定義為一種支援內聯參數嘅命令。
2. 通信層 (App Server RPC)
TUI 通過 RPC 請求同後端通信。喺 thread_goal_handlers.rs /goal 入面,系統會檢查 Feature Gate 並驗證線程持久化狀態。
3. 持久化層 (State DB)
目標儲存喺 SQLite 嘅 thread_goals goal 表入面,包含 objective、status、token_budget 等核心字段。
四、核心實現 1:用量核算與預算限制
/goal /goal 嘅強大之處在於佢可以精確感知任務消耗。喺 codex-rs/state/src/runtime/goals.rs 中,account_thread_goal_usage Runtime 負責更新進度。
⚠️ 物理計費 vs 邏輯計費:系統會自動扣除 Cached Input Tokens,只計算真實嘅推理成本。
當消耗超過 token_budget token_budget 時,狀態切換為 BudgetLimitedover_budget。此時,Runtime 會向模型注入一條隱藏嘅 developer steering 消息,引導模型「盡快收尾」,實現優雅嘅預算轉向(Steering)。
五、核心實現 2:自主續航環路 (Continuation)
呢個係實現「自主智能體」最關鍵嘅一環。當 Goal 處於 Active 狀態而且 Thread 空閒時,GoalRuntimeState Continuation 會被激活。
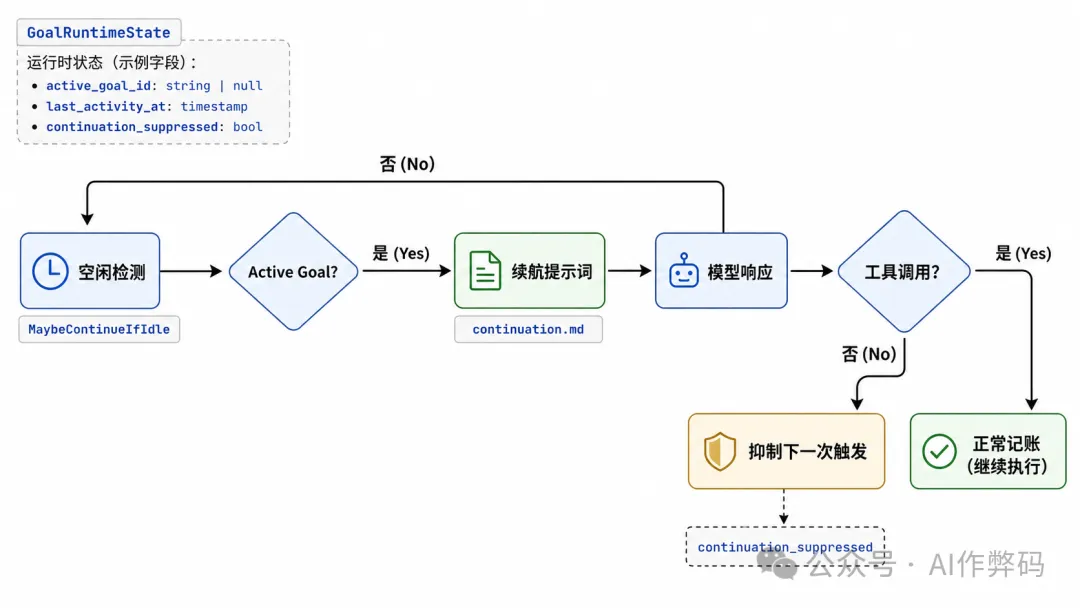
為咗防止死鎖,如果模型喺上一輪冇進行任何工具調用,系統會抑制下一次自動觸發。呢種設計保證咗智能體喺遇到瓶頸時可以停落嚟等用戶介入。
呢個「空閒」判斷並唔等同於用戶界面暫時冇鬱動:源碼會同時排除已有活躍 Turn、下一輪隊列已有輸入,以及觸發 Turn 嘅內部 mailbox 已有待處理消息等情況。
六、模型工具:智能體嘅自我管理
Codex 向模型暴露咗三個核心工具,令模型由「被動執行者」變成「預算敏感嘅任務管理者」:
1. create_goal: 主動建立持久化目標
2. get_goal: 查看剩餘預算和用量
3. update_goal: 任務完成後標記 complete
寫喺最後
/goal 命令嘅實現係一次教科書式嘅「持久化 + 運行時刻核算」實踐。佢通過 SQLite 錨定咗長期記憶,通過 Runtime 環路賦予咗自主性,又通過提示詞工程實現咗優雅嘅邊界控制。
在 OpenAI Codex rust-v0.128.0 版本中,/goal 命令的引入讓 Codex 開始具備更明確的長任務追蹤能力。本文將深入 Codex 源碼,揭秘這一功能是如何從 TUI 命令解析、App Server RPC,一路深入到 Core Runtime 和 SQLite 持久化層的。
一、先理解 Ralph Loop:把智能體跑成一個可驗證閉環
理解 /goal 之前,最好先理解 Ralph Loop。它聽起來很粗暴:一個 while true 循環反覆啓動 AI 編碼 Agent,把同一份任務說明或規格文檔餵給模型,讓它讀代碼、做修改、運行驗證、輸出完成或卡住的信號,然後進入下一輪。
這個模式真正重要的不是“無限循環”,而是四個工程約束:
目標規格外部化:目標不靠模型短期記憶保存,而是落在 PRD、任務清單、測試、倉庫文件裏。
每輪執行可丟棄:上下文窗口可以刷新,Agent 每輪重新讀取現實狀態,減少長上下文漂移。
驗證形成反壓:測試、類型檢查、Lint、日誌和評審結果會告訴 Agent “還沒過”,迫使它繼續修。
退出信號明確:完成、卡住、超預算都必須有可觀察的狀態,而不是靠模型一句“差不多了”。
所以 Ralph Loop 的本質是一種“目標 -> 執行 -> 觀察 -> 修正 -> 再執行”的控制環。Codex 的 /goal 可以看作這個思想在產品裏的內建版本:它不再依賴外部 bash 腳本反覆啓動進程,而是把目標、狀態、預算、續航提示詞和完成工具都接進同一個 Thread runtime。
二、 什麼是 /goal?
對於長航時任務(Long-running tasks),開發者往往需要 AI 保持對終極目標的關注,而不是在多輪對話中逐漸“失憶”。/goal 命令允許用戶為當前會話設置一個持久化的目標。
狀態化:目標存儲在 SQLite 中,重啓 Codex 依然存在。
自動化:當目標處於 Active 狀態且會話空閒時,Codex 會自動觸發下一輪對話以繼續任務。
可控性:支持 Token 預算限制,防止智能體陷入無限循環或過度消耗。
三、 技術全景圖:從指令到狀態
/goal 的實現並非單一模塊的堆砌,而是一個縱貫全棧的精妙設計。
1. 交互層 (TUI & Slash Command)
在 codex-rs/tui/src/slash_command.rs 中,SlashCommand::Goal 被定義為一種支持內聯參數的命令。
2. 通信層 (App Server RPC)
TUI 通過 RPC 請求與後端通信。在 thread_goal_handlers.rs 中,系統會檢查 Feature Gate 並驗證線程持久化狀態。
3. 持久化層 (State DB)
目標存儲在 SQLite 的 thread_goals 表中,包含 objective, status, token_budget 等核心字段。
四、 核心實現 1:用量核算與預算限制
/goal 的強大之處在於它能精確感知任務消耗。在 codex-rs/state/src/runtime/goals.rs 中,account_thread_goal_usage 負責更新進度。
⚠️ 物理計費 vs 邏輯計費:系統會自動扣除 Cached Input Tokens,只計算真實的推理成本。
當消耗超過 token_budget 時,狀態切換為 BudgetLimited。此時,Runtime 會向模型注入一條隱藏的 developer 消息,引導模型“儘快收尾”,實現優雅的預算轉向(Steering)。
五、 核心實現 2:自主續航環路 (Continuation)
這是實現“自主智能體”最關鍵的一環。當 Goal 處於 Active 狀態且 Thread 空閒時,GoalRuntimeState 會被激活。
為了防止死鎖,如果模型在上一輪沒有進行任何工具調用,系統會抑制下一次自動觸發。這種設計保證了智能體在遇到瓶頸時能停下來等待用戶干預。
這個“空閒”判斷並不等同於用戶界面暫時沒動靜:源碼會同時排除已有活躍 Turn、下一輪隊列已有輸入,以及觸發 Turn 的內部 mailbox 已有待處理消息等情況。
六、 模型工具:智能體的自我管理
Codex 向模型暴露了三個核心工具,讓模型從“被動執行者”變成了“預算敏感的任務管理者”:
1. create_goal: 主動建立持久化目標
2. get_goal: 查看剩餘預算和用量
3. update_goal: 任務完成後標記 complete
寫在最後
/goal 命令的實現是一次教科書式的“持久化 + 運行時刻核算”實踐。它通過 SQLite 錨定了長期記憶,通過 Runtime 環路賦予了自主性,又通過提示詞工程實現了優雅的邊界控制。